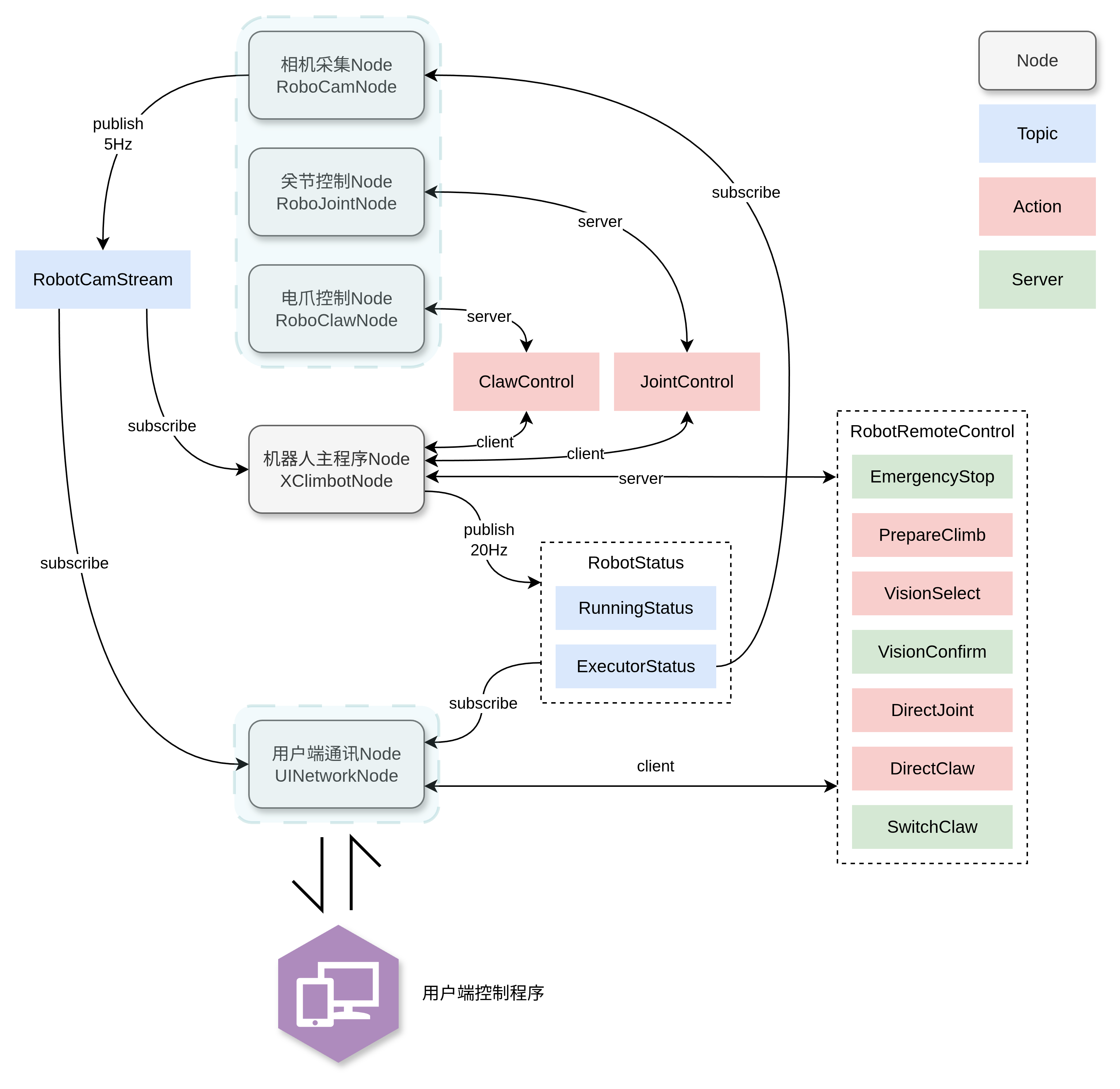
ROS2通讯总览
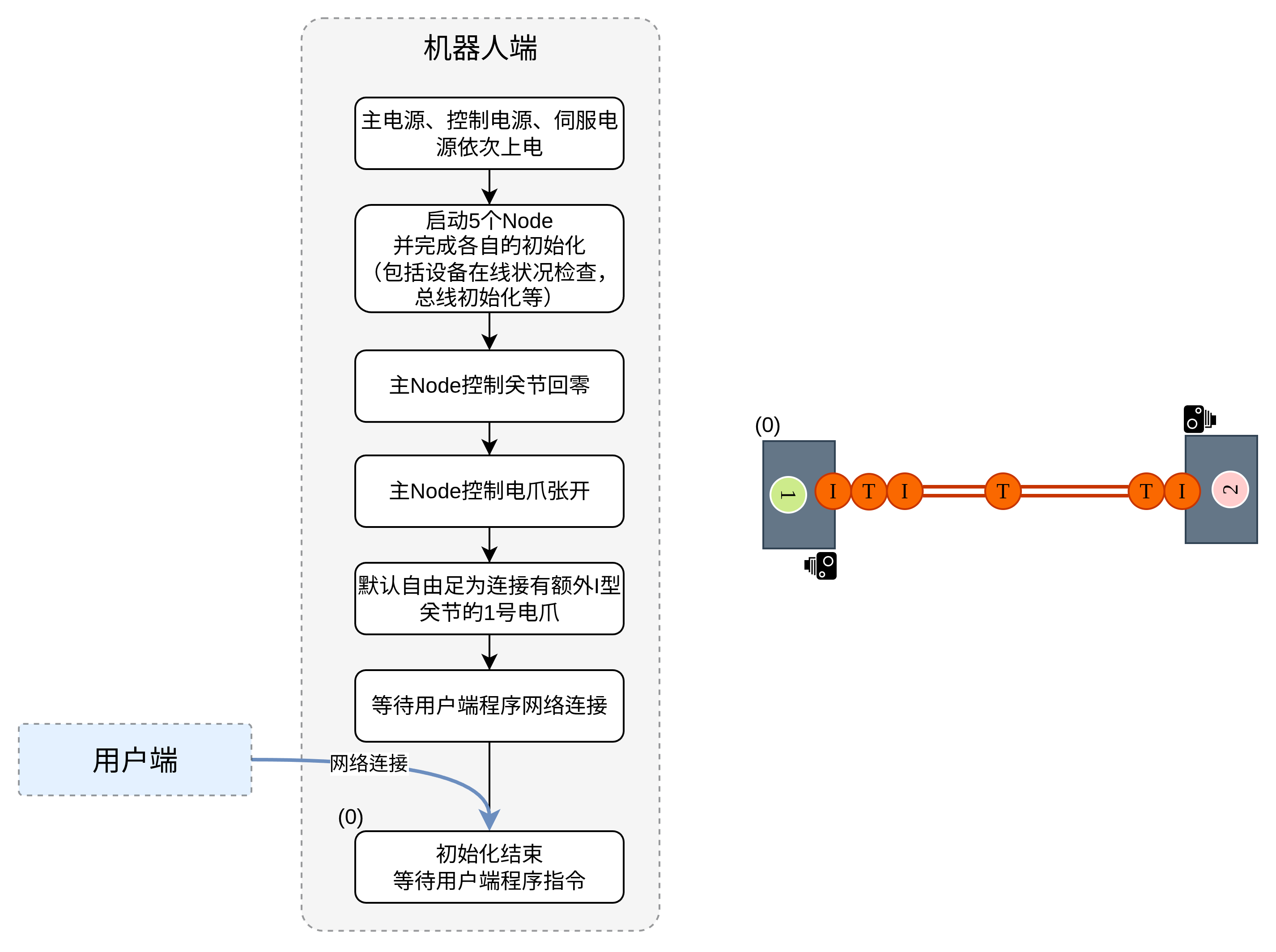
机器人运行流程 初始化流程
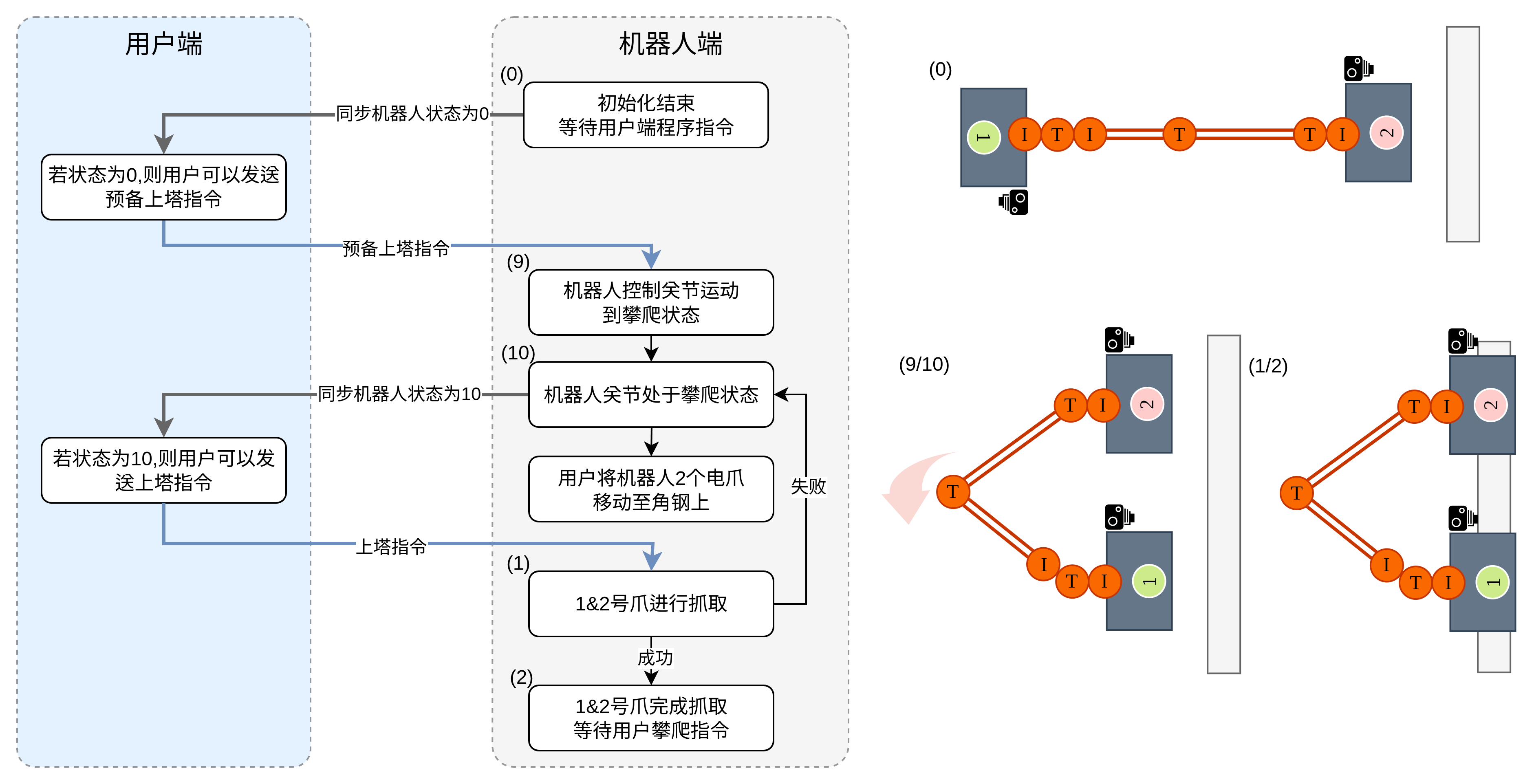
上塔流程
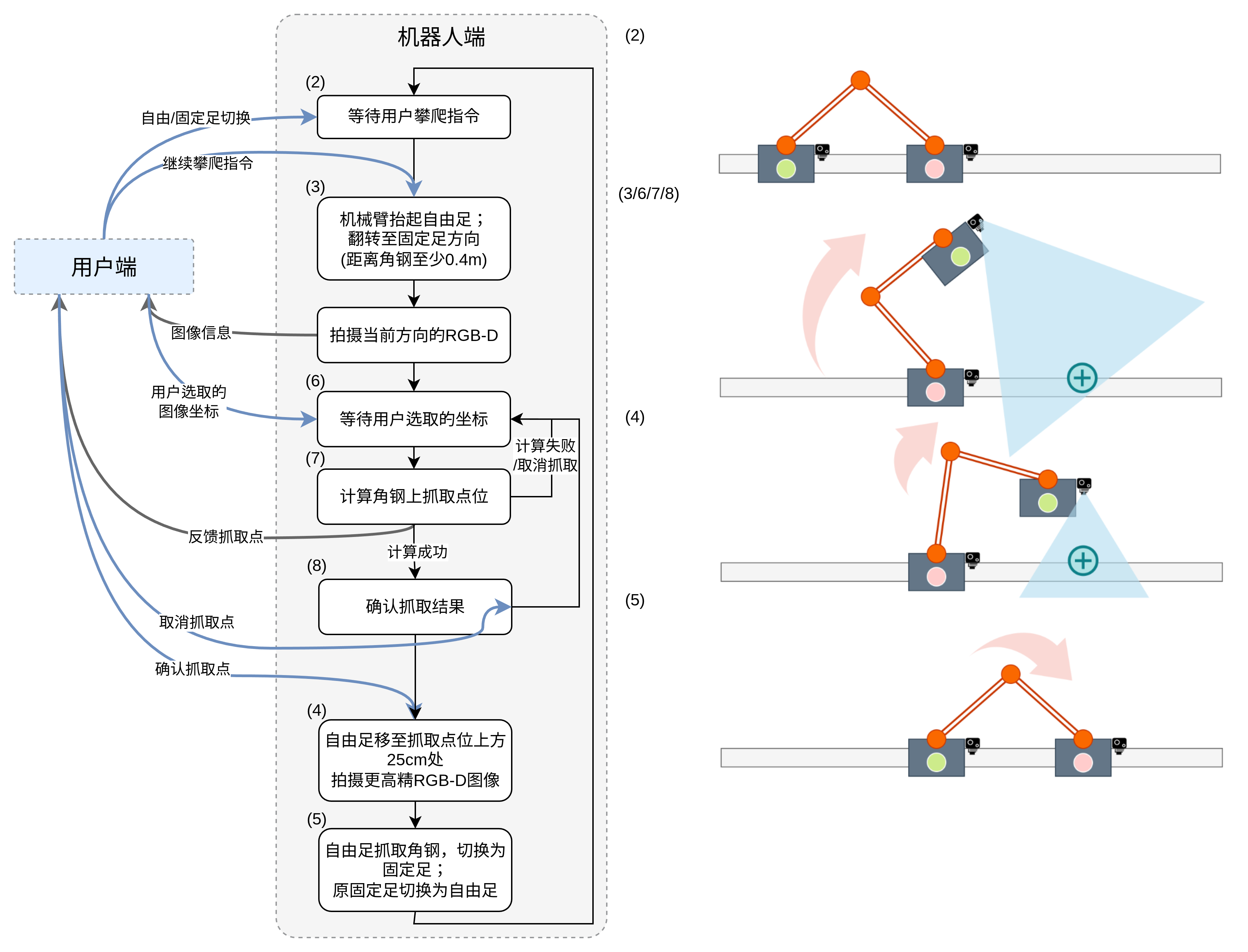
攀爬流程
下塔流程 待定,与上塔类似
Node解释 相机采集Node(RoboCamNode) 获取3个相机的视频流
关节控制Node(RoboJointNode) 通过CAN通讯控制机械臂关节
电爪控制Node(RoboClawNode) 通过485通讯控制机器人电爪
主程序Node(XclimbotNode) 负责机器人的主要运行流程
用户端通讯Node(UINetworkNode) 负责与用户端控制程序进行网络通讯
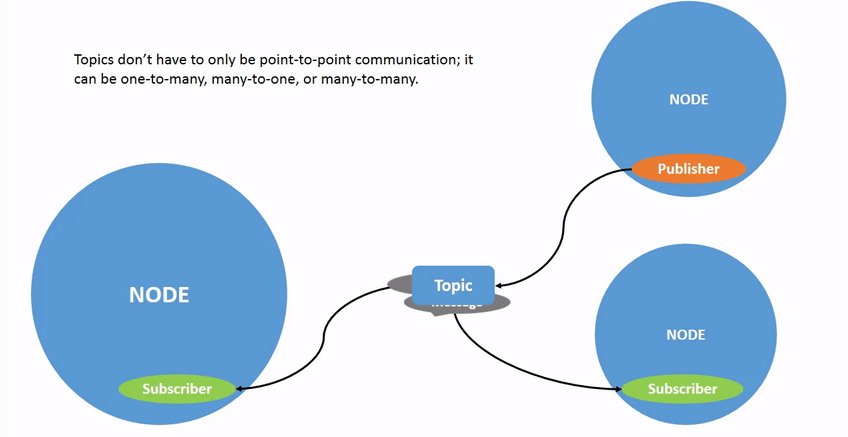
ROS Topic
RobotCamStream.msg 持续publish视频流信息
1 2 3 4 5 6 int8 maincam # 1 for camera_1, 2 for camera_2 uint16 rows # height = 720 uint16 cols # width = 1280 uint16[] depth_data uint8 dimension # colorspace = 3 uint16[] color_data
ExecutorStatus.msg 返回当前机器人的执行器状态:
1 2 3 4 5 int8[2 ] claw_status = 0 ~4 int8 fasten_status = 0 ~4 int8 freeClaw = 1 | 2 int8[6 ] joint_status, int64[6 ] joint_angle
RunnningStatus.msg 返回当前机器人的状态
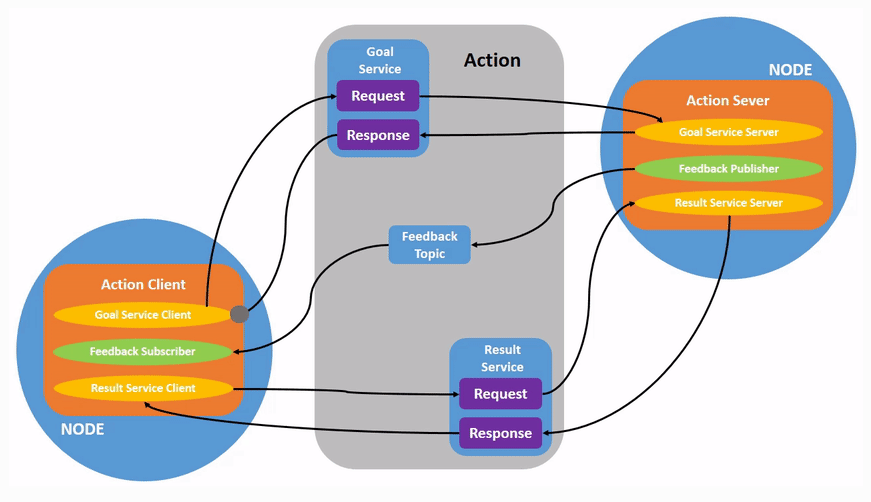
ROS Action
### JointControl.action
Request 请求关节执行一次关节空间运动。
**Note:需要多个关节同步执行指令,同时做动。**
包含六个关节的目标角度:
1 2 int64[6 ] goal_angle int8[6 ] vel_limit = 0 ~30
Feedback 为以5Hz频率返回当前关节角度和关节运动状态,表示正在正常执行。
1 2 int64[6 ] current_angle int8[6 ] current_running
Result 用于描述关节运动任务的最终执行结果,仅在任务结束后可获取。
1 2 bool success = true | false string message
ClawControl.action 用于控制机器人电爪运动。
1 2 3 4 5 6 7 8 9 10 11 12 13 int8 index = 1 | 2 int8 grab = 0 | 1 int32 force = 700 int8 index = 1 | 2 int8 running_status = 0 | 1 int8 index = 1 | 2 bool success = true | false string message
PrepareClimb.action 机器人在攀爬结束后两足均抓取于角钢上,此时需要用户发出继续攀爬指令,机器人抬起自由足会运动到拍摄深度图像的位置。
仅当机器人处于status 2(即“等待用户攀爬指令”)时可以发出指令
1 2 3 4 5 6 7 8 9 10 bool prepare = true int64[6 ] current_angle int8[6 ] current_running bool success = true | false string message
VisionSelect.action 用户在用户端点选角钢的坐标数据通过网络发送到用户端通讯Node之后,该Node将坐标信息作为指令目标传给主程序Node,由主程序Node进行图像分析得到抓取点,将mask和抓取点反馈给通讯端Node用于显示。
这个视觉选择的请求只有当机器人处于status 6 (即“等待用户选取的坐标”)时才有效
1 2 3 4 5 6 7 8 9 10 11 12 int16 point_x = 0 -1280 int16 point_y = 0 -720 bool success = true | false bool [720 ][1280 ] mask int16 result_x = 0 -1280 int16 result_y = 0 -720 string message
DirectJoint.action
直接控制应该为用户端的一个独立窗口(通过菜单栏选项调出)
用户端通讯Node发给主程序Node的指令,可让用户端直接控制关节的运动。
1 2 3 4 5 6 7 8 9 10 11 int64[6 ] goal_angle int8 vel_limit = 0 ~30 int64[6 ] current_angle int8[6 ] current_running bool success = true | false string message
DirectClaw.action
直接控制应该为用户端的一个独立窗口(通过菜单栏选项调出)
用户端通讯Node发给主程序Node的指令,可让用户端直接控制电爪的运动。
1 2 3 4 5 6 7 8 9 10 11 12 13 int8 index = false | true int8 task = 0 | 1 int32 force = 700 int8 index = false | true int8 task = 0 | 1 int8 index = 1 | 2 bool success = true | false string message
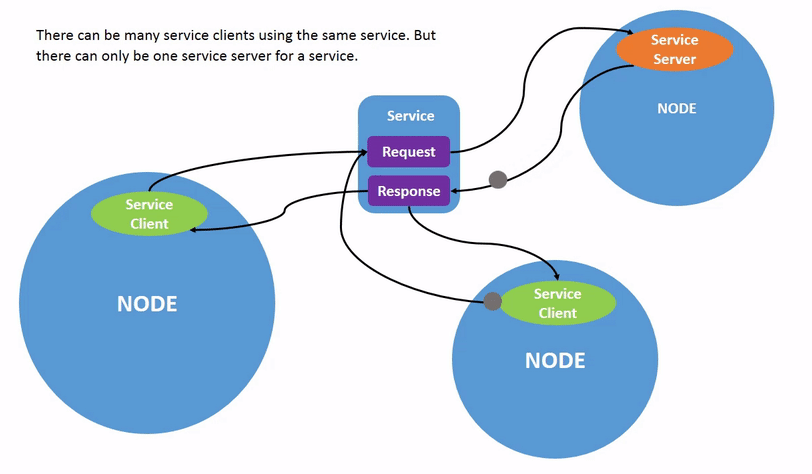
ROS Service
### EmergencyStop.srv
用户在用户端点击急停按钮通过网络发送到用户端通讯Node之后,用户端通讯Node将确认信息通过service告知主程序Node
> 急停的具体行为为:cancel joint action, 让固定足保持夹持状态,自由足保持张开
1 2 3 4 5 6 bool stop = true bool success = true | false string message
VisionConfirm.srv 用户端确认抓取点和mask有效与否,将确认信息发回给机器人的用户端通讯Node,用户端通讯Node将确认信息通过service告知主程序Node
这个确认的请求只有当机器人处于status 8 (即“确认抓取结果”)时才有效
1 2 3 4 5 bool confirm = true | false bool received = true
SwitchClaw.srv 用户端点击切换电爪的按钮后,将切换指令发给机器人的用户通讯端Node,用户端通讯Node将确认信息通过service告知主程序Node
仅当机器人处于status 2时可以切换。
1 2 3 4 5 6 bool switch = true bool success = true | false string message
备注 1 使用一个package robot_interfaces 用于存放所有的接口定义
只放接口定义
不含任何 node
被 server / client / pub / sub 共同依赖
例如:
1 2 3 4 5 6 7 8 9 10 11 my_robot_interfaces/ ├── msg/ │ └── RobotCamStream.msg ├── srv/ │ └── RunningStatus.srv │ └── ExecutorStatus.srv │ └── ... └── action/ └── ClawControl.action └── JointControl.action └── ...
2 主程序的核心功能由毕老师实验室团队负责实现。杨总团队需基于主程序框架,在主程序中自行完成本文档所定义的各类 ROS 接口(包括 Action、Service、Topic)的 Server 端实现。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 import rclpyfrom rclpy.node import Nodefrom rclpy.action import ActionServer, GoalResponse, CancelResponsefrom my_robot_interfaces.action import JointControlimport threadingimport timeclass XclimbotMainNode (Node ): def __init__ (self ): super ().__init__('xclimbot_main_node' ) self .current_joint_angle = [0 ] * 6 self .current_joint_running = [0 ] * 6 self ._action_server = ActionServer( self , JointControl, 'joint_control' , execute_callback=self .execute_callback, goal_callback=self .goal_callback, cancel_callback=self .cancel_callback ) self .get_logger().info('JointControl Action Server started' ) def goal_callback (self, goal_request ): self .get_logger().info( f'Received goal: {list (goal_request.goal_angle)} , ' f'vel_limit={goal_request.vel_limit} ' ) if len (goal_request.goal_angle) != 6 : self .get_logger().warn('Invalid goal angle length' ) return GoalResponse.REJECT return GoalResponse.ACCEPT def cancel_callback (self, goal_handle ): self .get_logger().warn('Received cancel request' ) return CancelResponse.ACCEPT def execute_callback (self, goal_handle ): self .get_logger().info('Executing JointControl goal' ) feedback = JointControl.Feedback() result = JointControl.Result() self .current_joint_running = [1 ] * 6 rate = self .create_rate(5 ) for step in range (20 ): if goal_handle.is_cancel_requested: self .get_logger().warn('Goal canceled during execution' ) self .current_joint_running = [0 ] * 6 result.success = False result.message = 'Goal canceled by client' goal_handle.canceled() return result for i in range (6 ): self .current_joint_angle[i] += 1000 feedback.current_angle = self .current_joint_angle feedback.current_running = self .current_joint_running goal_handle.publish_feedback(feedback) self .get_logger().debug( f'Feedback sent: {feedback.current_angle} ' ) rate.sleep() self .current_joint_running = [0 ] * 6 result.success = True result.message = 'Joint motion finished successfully' goal_handle.succeed() self .get_logger().info('JointControl goal succeeded' ) return result def main (args=None ): rclpy.init(args=args) node = XclimbotMainNode() rclpy.spin(node) node.destroy_node() rclpy.shutdown() if __name__ == '__main__' : main()
测试仅针对接口本身,不涉及对于具体机器人运行逻辑的测试。